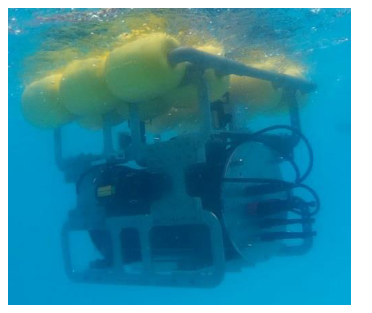
Gambar 1. Prototipe AUV
Sumber: https://journals.utm.my/jurnalteknologi/article/view/4818/3330
Terdapat pendekatan baru pada penelitian bawah laut yang terbuat dari tiang vertikal dengan menggunakan dua unit AUV mikro yang cara kerjanya kooperatif. Dimana, strategi yang disusun ini bertujuan untuk mengatasi keterbatasan dari metode konvensional seperti penggunaan penyelam yang berisiko tinggi serta ROV yang terbatas oleh kabel kendali. Dengan memanfaatkan sistem navigasi dan komunikasi bawah laut berbasis akustik, dua AUV dapat bergerak secara melingkar mengelilingi tiang pada arah berlawanan secara terkoordinasi. AUV utama (Vehicle A) bertindak sebagai pemimpin dengan sistem navigasi presisi tinggi, sementara AUV kedua mengikuti dengan sinkronisasi posisi secara periodik.
Design AUV Mikro & Sistem Elektronik
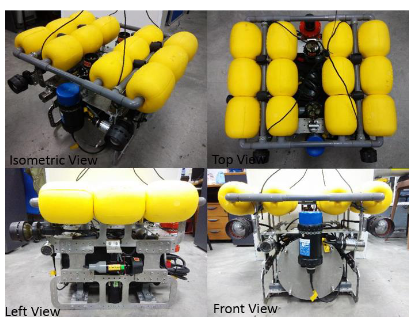
Gambar 2. Desain mekanis AUV berbentuk kotak
Sumber: https://journals.utm.my/jurnalteknologi/article/view/4818/3330
AUV yang dikembangkan memiliki desain berbentuk kotak (sedikit mirip ROV), dengan lima thruster untuk menghasilkan 5 DOF (degrees of freedom) gerak. AUV dilengkapi dengan sensor visual, sonar, gyroskop, altimeter, sensor suhu, dan sistem komunikasi akustik untuk memastikan kemampuan inspeksi visual dan respons terhadap lingkungan bawah laut. Desain mekanik ini mengadopsi prinsip-prinsip yang telah dibahas oleh Bolbot et al. (2023), yang menekankan pentingnya integrasi antara sistem kendali, sensor, dan daya apung dalam mengembangkan AUV yang stabil dan mampu beradaptasi dengan dinamika laut.
Efektivitas Strategi Kooperatif dalam Inspeksi Tiang Bawah Laut
Strategi desain yang telah dibuat untuk menyelesaikan permasalahan dan juga inspeksi dalam waktu kurang dari satu jam dengan mengakomodasikan keterbatasan daya baterai pada AUV mikro. Perhitungan waktu inspeksi untuk tiang setinggi 80m dengan diameter 3m hanya memerlukan waktu 23,6 menit dan hal ini cukup menunjukkan efisiensi waktu dan energi secara signifikan. Sistem ini juga telah dirancang untuk tetap menjaga jarak optimal terhadap permukaan tiang berdasarkan parameter visual field of view (vFOV), sehingga dapat memaksimalkan cakupan pengambilan gambar. Efektivitas penggunaan AUV ganda ini juga telah dikaji serta dianalisis dalam penelitian Liu et al. (2023) yang menekankan pentingnya sistem swarm dalam meningkatkan efisiensi operasi bawah laut secara simultan dan terkoordinasi.
Potensi Integrasi Sensor Lingkungan dalam Sistem AUV
Selain sebagai fungsi inspeksi, pendekatan yang sudah dilakukan juga dapat membuka suatu peluang integrasi dari sensor lingkungan seperti sensor oksigen terlarut (DO), salinitas, dan pH untuk dilakukan pemantauan kualitas perairan secara bersamaan. Hal ini juga dapat memperluas manfaat serta fungsi dari AUV yang tidak hanya berperan terhadap aspek teknis struktural, tetapi juga ekologis, sebagaimana pernyataan tersebut didukung oleh penelitian Aguiar et al. (2009), bahwa kendaraan bawah laut otonom multiperan (multi-role AUVs) yang dapat menjalankan misi inspeksi sekaligus survei lingkungan laut secara efisien.
Pendekatan menggunakan dua AUV mikro sangat tepat diterapkan di Indonesia, khususnya untuk memantau tiang dermaga, pondasi PLTU pesisir, dan instalasi budidaya laut. Namun demikian, kondisi perairan Indonesia yang memiliki kekeruhan tinggi, variabilitas arus, dan banyaknya biodiversitas membuat sistem kamera dan pencahayaan perlu disesuaikan lebih jauh.
Writer : Instrumentation and Marine Technical Survey Bureau