
Evaluasi akurasi sistem pengukuran gravitasi laut merupakan aspek penting dalam bidang oseanografi, geodesi, dan eksplorasi geodinamika. Gravimeter tradisional seperti spring-type LaCoste & Romberg S-129 telah lama digunakan, namun dalam konteks kebutuhan modern—yang menuntut efisiensi, portabilitas, serta kemampuan bekerja dalam kondisi laut dinamis—teknologi strapdown marine gravimeter berbasis Inertial Navigation System (INS) menjadi solusi yang menjanjikan. Pada penelitian ini, memperkenalkan dan mengevaluasi kinerja sistem SAG-2M, sebuah gravimeter laut modern yang menggabungkan sensor IMU dan sistem GNSS berbasis Precise Point Positioning (PPP) untuk meningkatkan akurasi dan efisiensi survei gravitasi laut.
Secara teoritis, prinsip kerja sistem gravimeter strapdown didasarkan pada hukum kedua Newton dan formulasi sistem navigasi inersia. Percepatan spesifik (specific force) yang ditangkap oleh akselerometer pada tiga sumbu diproyeksikan ke sistem koordinat lokal menggunakan matriks sikap (attitude matrix) yang dikoreksi oleh data posisi dari GNSS. Perbedaan antara gaya spesifik vertikal dengan percepatan gerak vertikal kapal menghasilkan data anomali gravitasi. Proses ini sangat tergantung pada stabilitas komponen IMU dan ketelitian koreksi sikap, yang bila tidak dikompensasi akan menimbulkan drift atau kesalahan sistematis dalam data akhir. Untuk mengatasi hal ini, sistem SAG-2M menggunakan algoritma kombinasi berbasis Kalman Filter adaptif, yang memungkinkan koreksi real-time terhadap error sikap berdasarkan perbandingan antara kecepatan dari INS dan GNSS (Gao et al., 2016).
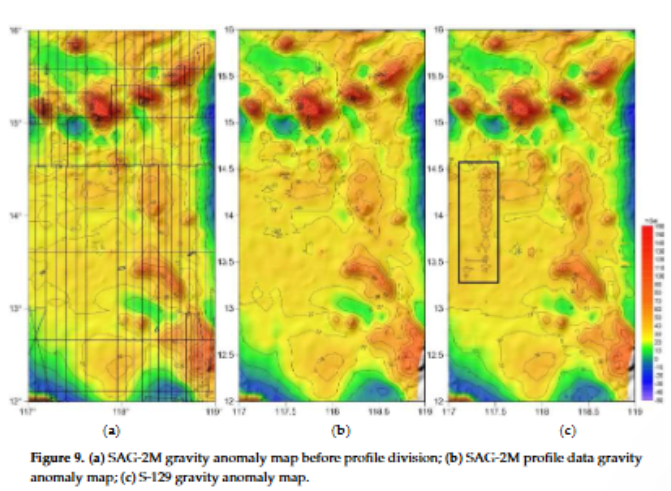
Kelebihan signifikan dari sistem gravimeter strapdown ini adalah desainnya yang lebih ringkas, ringan, dan hemat daya. Hal ini penting untuk aplikasi masa depan seperti kendaraan bawah laut tanpa awak (AUV) atau platform survei laut dalam yang membutuhkan perangkat berukuran kecil namun tetap akurat (Ayres-Sampaio et al., 2015). Dibandingkan dengan gravimeter platform konvensional yang memiliki keterbatasan dalam miniaturisasi dan efisiensi, teknologi seperti SAG-2M menawarkan potensi pengembangan jangka panjang yang jauh lebih besar. Secara spektral, hasil peta anomali gravitasi dari SAG-2M juga menunjukkan resolusi spasial yang lebih tinggi, terutama di daerah sekitar terumbu atau pulau yang mengalami perubahan gravitasi secara tajam. Gambar peta anomali yang dihasilkan dari data SAG-2M mencakup lebih banyak detail, bahkan termasuk data ketika kapal berhenti atau berputar yang tidak bisa dimanfaatkan oleh sistem S-129. Dengan demikian, efisiensi kerja lapangan dan waktu pemrosesan data pasca-survei dapat ditingkatkan secara signifikan.
Perbandingan Karakteristik Sistem SAG-2M dan Gravimeter Konvensional
Dalam pengukuran gravitasi laut, dibandingkan dengan gravimeter konvensional berbasis pegas seperti LaCoste & Romberg S-129, sistem strapdown gravimeter SAG-2M memiliki desain dan kinerja yang jauh berbeda dalam pengukuran gravitasi laut. Prinsip kerja S-129 adalah pendulum, dan platform stabilisasi mekaniknya sensitif terhadap kondisi laut dan pergerakan kapal. Seringkali, data tidak dapat digunakan saat kapal berputar, berhenti, atau mengalami gelombang besar karena sistem ini sangat bergantung pada posisi horizontal tetap (Wang et al., 2018).
Sebaliknya, SAG-2M dirancang menggunakan platform fisik tetap, dipadukan dengan IMU dan GNSS-PPP, yang membuat sistem ini lebih tahan terhadap gangguan dinamis. Kelebihan desain strapdown memungkinkan sensor tetap bekerja bahkan ketika kapal bermanuver tajam. Dengan berat hanya 60 kg dan konsumsi daya rendah, SAG-2M tidak hanya unggul dalam aspek akurasi, tetapi juga dalam portabilitas dan efisiensi kerja di lapangan. Dari aspek ini, SAG-2M menunjukkan potensi besar untuk menggantikan gravimeter konvensional dalam misi survei laut modern, termasuk pada kendaraan bawah laut otonom atau misi berawak di laut dalam yang membutuhkan perangkat kompak dan efisien.
Implementasi Algoritma Kombinasi INS dan PPP dalam Koreksi Data
Salah satu keunggulan utama SAG-2M adalah kemampuannya dalam melakukan koreksi terhadap error navigasi inersia menggunakan kombinasi data INS dan PPP. Kombinasi ini dilakukan melalui pendekatan Kalman Filter adaptif, yang dapat mengoreksi kesalahan sikap akibat drift dari giroskop dan akselerometer. Komponen error seperti Eötvös correction, drift akselerasi, dan gangguan vertikal dari gerakan kapal dihitung dan dihilangkan menggunakan data PPP yang lebih stabil, sehingga menghasilkan perhitungan anomali gravitasi yang lebih presisi (Gao et al., 2016).
Proses ini mencakup perhitungan sikap dan kecepatan dari IMU, kemudian dibandingkan dengan data dari GNSS PPP untuk menghitung nilai koreksi, sebelum akhirnya dikonversi ke komponen gaya vertikal. Hasil akhir berupa anomali gravitasi bebas udara (FAA) disaring menggunakan filter low-pass untuk mengurangi noise frekuensi tinggi. Teknologi ini memungkinkan SAG-2M mempertahankan kestabilan data meski dalam kondisi laut buruk. Teori ini diperkuat oleh Jekeli (2001), yang menyatakan bahwa pemrosesan data gravitasi berbasis INS membutuhkan simulasi platform matematis yang sangat sensitif terhadap noise dan drift, sehingga integrasi GNSS mutakhir adalah solusi krusial untuk mendapatkan hasil yang akurat.
Evaluasi Hasil: Akurasi, Resolusi, dan Stabilitas Data
Evaluasi data dari penelitian ini menunjukkan bahwa SAG-2M mengungguli S-129 dalam hampir semua aspek pengukuran. Sebelum koreksi perbedaan, Nilai RMS crossover error SAG-2M adalah 1.35 mGal tetapi turun menjadi 0.69 mGal setelah koreksi, menunjukkan peningkatan akurasi yang signifikan. Sebaliknya, nilai RMS crossover error S-129 hanya 0,95 mGal koreksi , yang menunjukkan bahwa itu masih lebih berubah dan rentan terhadap noise.
Sistem S-129 mengeluarkan sinyal dan suara frekuensi tinggi selama hingga enam menit saat mengalami gelombang tinggi, mengganggu integritas data . Sebaliknya, data SAG-2M halus dan stabil, yang menunjukkan bahwa ia tahan terhadap gangguan lingkungan. Selain itu, resolusi spasial SAG-2M mampu mencapai skala 1,5 km dengan akurasi kurang dari 1 mGal, bahkan di daerah dengan gradien gravitasi tinggi, seperti di sekitar terumbu karang. Ini menunjukkan kemampuan SAG-2M untuk menangkap perubahan mikro dalam medan gravitasi laut, yang merupakan komponen yang sangat penting dalam pemetaan geodinamika dasar laut.
Sumber https://www.mdpi.com/1424-8220/18/11/3902
Visualisasi data dalam bentuk peta anomali gravitasi diatas menunjukan bahwa SAG-2M mampu menghasilkan detail yang lebih tajam dan konsisten. Bahkan data saat kapal berputar atau berhenti pun tetap dapat digunakan, memperluas cakupan pengamatan dan menghemat waktu survei. Fakta ini menjadikan SAG-2M sebagai sistem yang tidak hanya akurat tetapi juga hemat biaya dan waktu, cocok untuk kebutuhan eksplorasi laut masa depan yang semakin kompleks dan dalam.
Writer : Instrumentation and Marine Technical Survey Bureau


